Autonomous dredging requires over 60% less energy than conventional dredging
Dredging is a necessary but energy consuming activity. Since especially highly populated countries like the Netherlands are located along the coastline with much of their land mass below NAP, dredging is required to combat the expected rise of sea levels due to climate change. C-Job Naval Architects developed the ALERD, which you may have read about in a few of our previous articles, to perform dredging activities in a sustainable and energy reduced manner.
C-Job intern turned Junior Naval Architect Mathijs Bakker spent his internship at C-Job diving deeper into the ALERD project which we updated you on last year. The ALERD (Autonomous Low Energy Replenishment Dredger) was developed together with MARIN as a concept for the Dutch Rijkswaterstaat for a sustainable and cost-effective ‘Solution for Coastal Care’. C-Job did extensive research to determine the actual energy requirement of ALERD. One of the main driving forces for the development of ALERD was its expected significant drop in energy requirement in comparison to commercial dredging vessels. Since, ALERD needs to dive and rise (contrary to surface vessels), and needs buoyancy compensation for the dredged soil, what these energy consumptions were, were the main topic of Mathijs’ work. This number, together with previous energy determinations, turn into the total energy cost of ALERD which can be equally compared to conventional dredgers.
In order to reach his goal, Mathijs first created a working model of the ALERD to simulate its behavior and motion control using MatLab and Simulink. The model contained a full dredging cycle which was created for the ALERD and was very similar to that of a conventional dredger. Performing the dredging cycle while maintaining zero trim and minimal undesired heave motions were the goal of the model. Disturbances were introduced in the model, such as the taking in a of dredging soil (sand) causing an unbalance in weight versus buoyancy, which then cause the submarine to sink. Similarly, small trim angles were introduced which were canceled out by moving of the ballast water, and likewise for balancing the buoyancy by adding or removing ballast water.
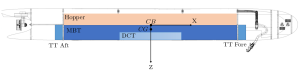
As stated earlier, on the contrary to conventional dredgers, ALERD also needs to dive and rise back to the surface of the water. In order to achieve this, the motion controlled model again uses ballast water to make this happen. The total amount of ballast water required to compensate all the motions and disturbances was analyzed by the motion controller inside the model, which resulted in an energy consumption afterwards.
After running numerous tests with the model, the outcome could be combined with energy requirements for propulsion and dredging operations from previous studies, and the total was compared with the amount of energy a traditional dredger uses. The conclusion could be made that the ALERD could potentially decrease total energy requirements by as much as 66%, quite a significant percentage. This proves the ALERD’s ability to do the same amount of work as a conventional dredger, at a much lower energy expenditure.
![]()
Last year Mathijs finished his studies at the Delft University of Technology, and recently his research paper was published in a scientific journal with support from C-Job R&D Consultant Rolph Hijdra and TU Delft Associate Professor Andrea Coraddu.
C-Job is keen on developing the concept even further and new research on this topic is already underway.